
基于多种图神经网络和Transformer的车辆轨迹预测方法
中文题目:基于多种图神经网络和Transformer的车辆轨迹预测方法
论文题目:Multiple Graph Neural Networks and Transformers for Vehicle Trajectory Prediction
录用期刊/会议:中国自动化大会 (CAA A类会议)
录用时间:2024.9.18
作者列表:
1) 杨 洁 中国石油大学(北京)人工智能学院 控制科学与工程 研22级
2) 刘建伟 中国石油大学(北京)人工智能学院 自动化系 教师
摘要:
在复杂的交通场景中,根据周围道路使用者的行为合理规划自己的前进路线对于自动驾驶汽车十分重要。为了更好的解决这一问题,本文提出了一种新颖的基于多种图神经网络和Transformer的车辆轨迹预测模型(MGNformer)。MGNformer中用于提取时空特征的编码器主要由空间交互感知模块(SIPM)和时间依赖感知模块(TDPM)构成,其中SIPM中包含多尺度超图神经模块(MHM)和图注意力模块(GAM),可以从不同维度上捕获轨迹数据中的空间交互特征,TDPM中通过使用可变形自注意力机制可以捕捉轨迹数据中时间维度上的长距离依赖关系。考虑到车辆意图对于未来轨迹的影响,本文额外设计了意图-轨迹融合模块,将车辆的意图概率与轨迹特征向量相融合来获取具有更加丰富信息的融合嵌入,将其馈入解码器中生成未来轨迹,以此提高轨迹预测的准确性。我们在两个公开的真实车辆轨迹数据集上对MGNformer进行了评估。实验结果表明,MGNformer在NGSIM数据集和HighD数据集上的RMSE降低了5.49%/16.67%,达到了预期结果。
背景与动机:
近年来,智能化的自动驾驶汽车因其无需驾驶员操纵的特点,在很大程度上缓解了交通拥堵的问题,减轻了驾驶员的驾驶负担,提高了驾驶安全。然而,真实的行车环境往往是复杂多变的,这对自动驾驶汽车的安全性提出了很高的要求。例如,当周围有其他车辆驶入,自动驾驶汽车应当及时减速以避免碰撞。自动驾驶车辆需要具备预测未来交通状况的能力,从而像人类驾驶员一样在行驶的过程中做出合理的决策规划。由于道路使用者之间存在着强烈的相互作用,并且这种相互作用是未知的,这使得准确建模和预测目标车辆的未来轨迹面临许多挑战。在过去的几年中,越来越多的研究人员开始使用LSTM等神经网络处理轨迹预测问题,预测精度得到了明显提升,但仍然存在着一些局限。首先,LSTM作为目前处理轨迹预测任务的主要方法,其工作原理是按顺序处理时间序列数据,以表征车辆的速度、方向和运动模式。在工作过程中LSTM需要不断地将自身上一刻的输出当作输入的反馈循环,这会为模型带来很高的计算成本,特别是对于处理时间跨度较大的预测问题仍然具有明显的局限性。其次,目前在轨迹预测问题上对注意力机制的应用过于简单,还无法细致地模拟出车辆之间的互动。最后,现有研究大多是将轨迹预测和车辆换道意图分别进行研究,建立两个预测模型,这样难免会忽略车辆换道意图于未来轨迹之间的内在联系,进而牺牲了准确性。
主要内容:
本文模型主要由编码器、意图-轨迹融合模块、解码器三部分组成,如图2所示。编码器中包含空间交互感知模块(SIPM)和时间依赖感知模块(TDPM),可以提取轨迹数据中的时空特征,进而获得意图特征向量和轨迹特征向量。意图-轨迹融合模块将车辆的意图概率与轨迹特征向量相融合获得具有更加丰富信息的融合嵌入。最后,解码器根据意图-轨迹的融合嵌入生成更加准确的轨迹。
SIPM由多尺度超图模块(MHM)和图注意力模块(GAM)构成。其中,MHM通过数据驱动的方式学习超图拓扑结构,从多个智能体轨迹中捕获成对和分组的交互,从而学习到更能表示空间交互信息的嵌入表示,结构如图3所示。GAM通过在节点之间引入注意力机制使得模型能够更好地捕捉节点之间的关系和和特征信息。MHM对于处理群体性的交互更具有优势,GAM则更擅长捕捉局部关键节点关系,将二者提取到的空间特征进行融合,可以获得更加全面的特征表示。TDPM主要是由可变形注意力机制、前馈神经网络、残差连接和归一化层组成的。意图-轨迹融合模块可以在轨迹特征馈入解码器生成未来轨迹之前,首先预测车辆的换道意图,并将意图概率与历史轨迹嵌入、轨迹特征向量进行融合,将此包含更丰富信息的嵌入馈入到解码器中,确保模型能够更加全面地理解场景动态,进而输出更为精确的车辆未来轨迹预测结果。解码器结构与TDPM结构类似,主要由可变形注意力层、前馈神经网络、残差连接和归一化层组成。
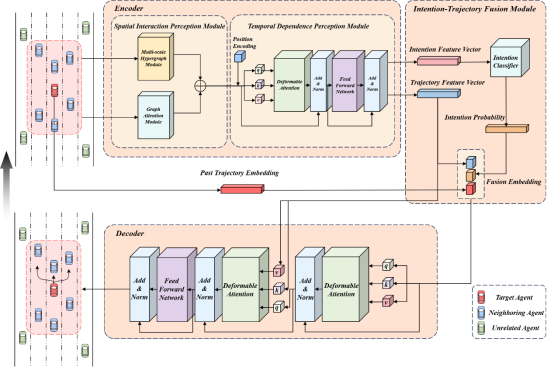
图2. MGNformer模型架构图
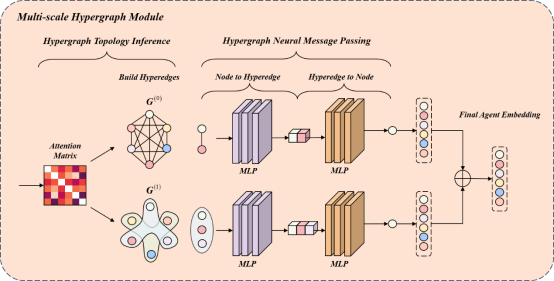
图3 MHM结构图
结论:
本文提出了一种基于多种图神经网络和Transformer的车辆轨迹预测方法使用多尺度超图神经网络和图注意力网络提取不同维度上轨迹数据的空间特征,使用可变形注意力机制捕捉轨迹数据中时间维度上的长距离依赖关系,进而得到高质量的轨迹时空特征。为了描述车辆意图与未来轨迹之间的相关性,本文额外设计意图分类任务,将车辆的意图概率与轨迹特征融合,从而生成更加准确的未来轨迹。实验结果表明,MGNformer在单模态预测和多模态预测上都明显优于其他最先进的方法目前,本工作仅在高速公路场景中验证了预测模型的效果,在未来的研究中我们将把模型的应用扩展到更广泛的应用场景中,以彰显实用价值。
作者简介:
刘建伟,教师,学者。发表学术研究论文280多篇。