
立管反冲的离散鲁棒H∞/H2最优保性能控制
中文题目:立管反冲的离散鲁棒H∞/H2最优保性能控制
论文题目:Discrete-time robust H∞/H2 optimal guaranteed performance control for riser recoil
录用期刊/会议:【Ocean Engineering】 (中科院二区)
原文DOI:【https://doi.org/10.1016/j.oceaneng.2024.117699】
录用/见刊时间:2024年3月27日
作者列表:
1) 岳元龙 中国石油大学(北京)人工智能学院 自动化系教师
2) 孙世龙 中国石油大学(北京)人工智能学院 控制科学与工程专业 硕22级
3) 左 信 中国石油大学(北京)人工智能学院 自动化系教师
摘要:
本文提出了一种新型的离散鲁棒H∞/H2最优保性能控制器,旨在解决具有模型不确定性的海洋立管的反冲问题。针对现有质量块-弹簧-阻尼模型,本文重点考虑了因张紧器机械性能退化和安装倾角变化导致的控制输入矩阵参数摄动,由此引入了模型不确定性因素。通过构建离散时间状态空间模型,设计基于线性矩阵不等式的控制器,以约束立管反冲过程中的速度与加速度的平均值和峰值。仿真结果表明,所提出的控制器在应对立管反冲时表现优于传统控制方法,尤其在控制输入发生摄动和复杂海况条件下,展现出卓越的鲁棒性。
背景与动机:
深水钻井立管系统是平台与海底井口的关键连接组件。当海上定位系统故障或遇到恶劣天气时,需要将海洋立管下部与海底基座分离。在分离瞬间,立管顶部张紧器储存在立管内部的弹性势能会迅速释放,导致立管反冲,严重危害生产安全,极易造成经济损失。目前,许多学者已经将传统控制方法应用于立管反冲问题,并取得了一定的控制效果。然而,现有的立管反冲模型未能充分考虑张紧器机械性能退化和安装角度变化引发的控制输入矩阵参数摄动。为了更贴近实际工况,设计一种能够有效应对这些不确定性因素并具备卓越性能的控制策略显得尤为重要。
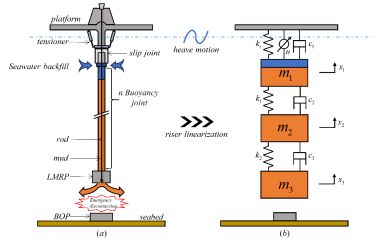
图1 (a)立管反冲示意图;(b)立管反冲质量块-弹簧-阻尼模型
设计与实现:
首先,基于张紧器的机械性能退化和安装角度变化,考虑了控制输入矩阵的参数摄动,建立了具有不确定性的增量式离散立管反冲状态空间模型。

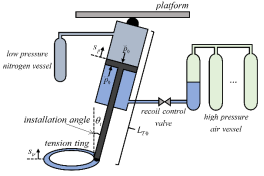
图2 张紧器示意图
为了约束立管反冲过程中的速度和加速度,本文通过设计状态权重矩阵Q和输入权重矩阵R,构建了性能输出方程Y2(K)。离散化后立管反冲模型的状态模型为
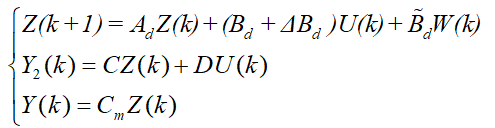
设计使闭环系统稳定的状态反馈控制律U满足如下性能指标
1. 闭环系统是渐进稳定的;
2. H∞性能指标:从W(K)到Y(K)的闭环传递函数满足
![]()
3. H2性能指标:闭环系统性能指标J(K)满足
![]()
为满足以上目标,建立如下的线性矩阵不等式求解控制律U

实验结果及分析:
本文使用南海某钻井平台的立管数据进行仿真测试,对比了鲁棒H∞/H2控制器(DRHGPC)与LQR控制器在四种不同海况下的性能。实验结果显示,所提出的控制器在应对立管反冲时,响应速度快,反冲幅度小,优于传统的LQR控制器,尤其在控制输入矩阵发生摄动与极端海况下表现更为优越,有效减少了设备损坏风险。
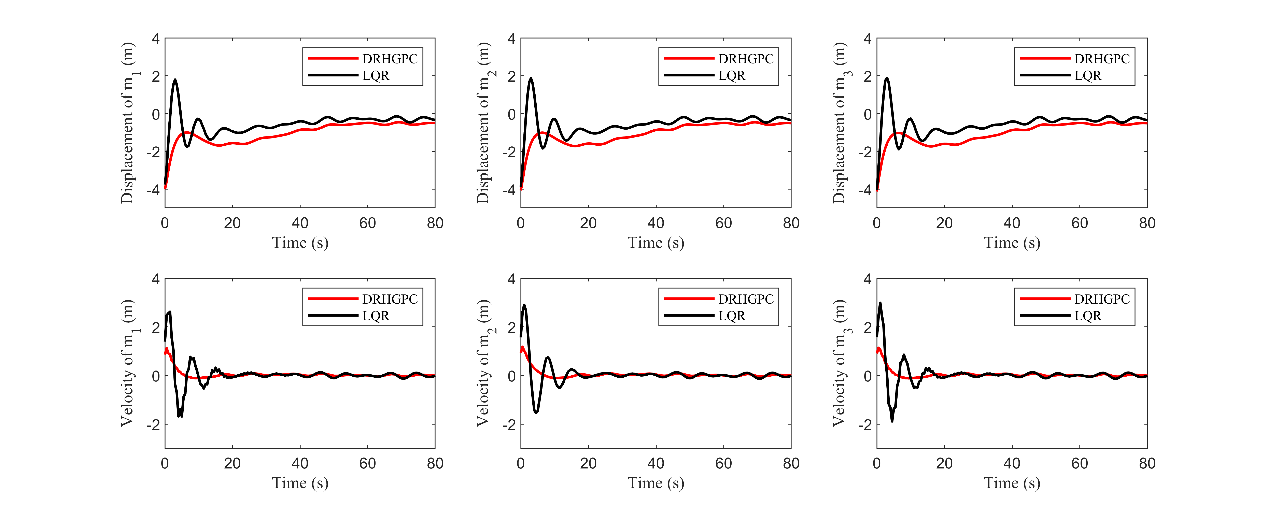
图3 LQR和DRHGPC控制下的立管反冲的位移与速度
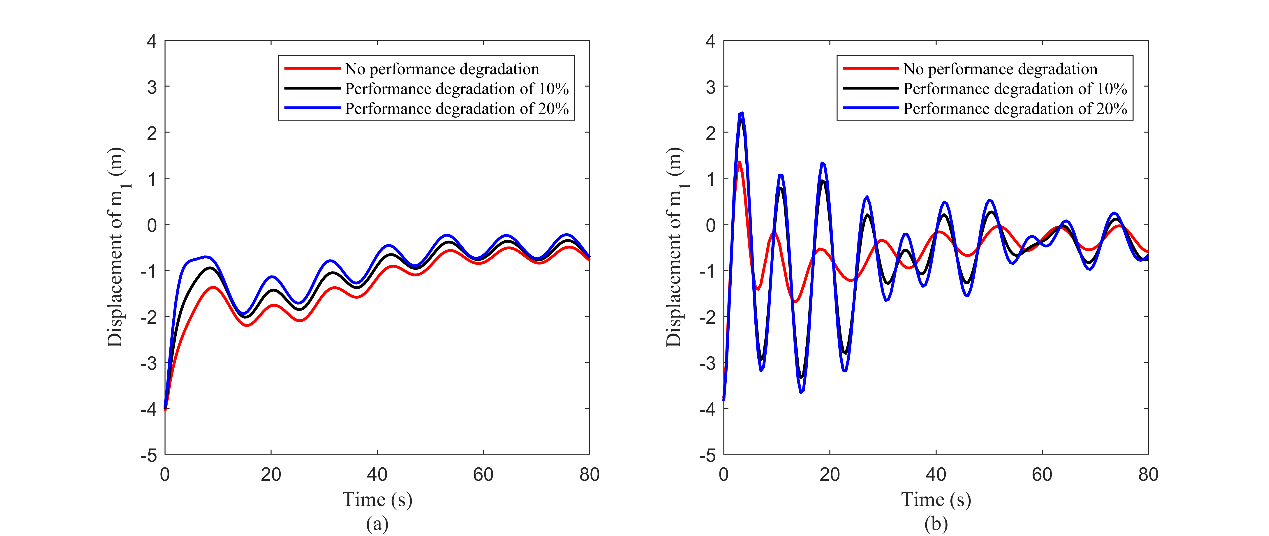
图4 张紧器不同机械性能时质量块一DRHGPC和LQR控制效果对比
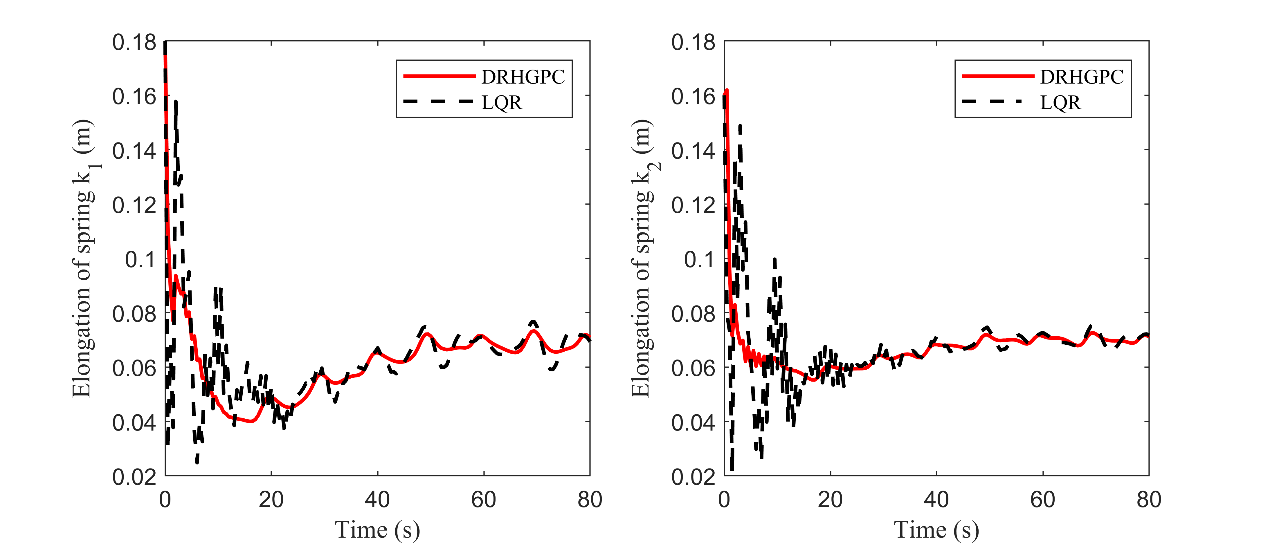
图5 等效弹簧形变对比
结论:
本文针对海洋立管反冲控制问题,考虑张紧器安装倾角变化和性能退化引发的不确定性,建立了新的立管反冲的动态模型。在此基础上,设计了一种基于H∞/H2理论的鲁棒控制器,能够约束立管反冲过程中位移和速度的最大值及其平均值。通过结合工程现场采集的离散信号与控制信号,利用线性矩阵不等式(LMI)方法求解控制器参数,仿真结果验证了该控制器在不确定条件下的优越性能,有效提升了系统的稳定性与抗干扰能力。
作者简介:
岳元龙,高级工程师。博士,中国石油大学(北京)人工智能学院自动化系高级工程师,从事深海油气水下控制系统关键技术研究、数据融合和嵌入式硬件开发。
联系方式:yueyuanlong232@126.com