
基于MPC和变论域S面算法的过驱动AUV三维路径跟踪
中文题目:基于MPC和变论域S面算法的过驱动AUV三维路径跟踪
论文题目:Three-Dimensional Path Tracking of Over-Actuated AUVs Based on MPC and Variable Universe S-Plane Algorithms
录用期刊/会议:Journal of Marine Science and Engineering (JCR Q1)
原文DOI:https://doi.org/10.3390/jmse12030418
原文链接:https://www.mdpi.com/2077-1312/12/3/418
录用/见刊时间:2024年2月27日
作者列表:
1) 许 锋 中国石油大学(北京)信息科学与工程学院/人工智能学院 自动化系 副教授
2) 张 磊 中国石油大学(北京)信息科学与工程学院/人工智能学院 控制工程专业 硕 21
3) 仲继彬 海洋石油工程股份有限公司 高级工程师
自主水下机器人(AUV,Autonomous Underwater Vehicle)广泛应用于海底管道的巡检,针对AUV巡检过程中受不确定性洋流干扰影响导致轨迹跟踪精度低、实时性差的问题,本文设计了一种新型的基于MPC和变论域S面算法的双闭环控制器,实现了过驱动AUV在不确定性洋流干扰下的三维轨迹跟踪。本文将MPC作为外环位置控制器,变论域S面控制器作为内环速度控制器,实现对整个轨迹的闭环跟踪。设计外环的MPC控制器时,考虑了系统的实际控制输入约束,引入控制增量减少控制模型误差和AUV实际模型参数受不确定性外界干扰的影响;设计内环的变论域S面控制器时,结合了变论域模糊控制器的强鲁棒性和S面算法的易构造特性,同时引入积分作用以提高系统的速度跟踪精度;两个控制器在设计时均使用了Lyapunov方法分析了闭环系统的稳定性。最后通过仿真表明过驱动AUV在不确定性洋流干扰下,跟踪过程迅速、实时性强、跟踪结果精度高,证明了所设计的双闭环控制器的有效性。
自主水下航行器(AUV)能够在各种复杂的水下环境中执行任务,并广泛应用在海洋调查和研究、海洋资源勘探、海底管道和电缆检查等领域。过驱动AUV由于有更多的执行器和控制输入,相比于欠驱动AUV,它拥有更高的机动性和控制能力,拓展了AUV的任务能力和应用范围。为了保证过驱动AUV能够安全、稳定、准确快速地完成各种水下特殊任务,需要对其三维轨迹跟踪控制技术进一步研究。然而,过驱动AUV的模型具有非线性性、耦合效应以及动态建模复杂性,其对建模误差、环境变化和执行器故障等不确定性因素更加敏感,这些特点使得过驱动AUV的控制器设计和分析更加复杂,因此,过驱动AUV的鲁棒和精确控制十分重要。
文章首先建立了过驱动AUV的运动学和动力学模型,设计了推力分别配方案。
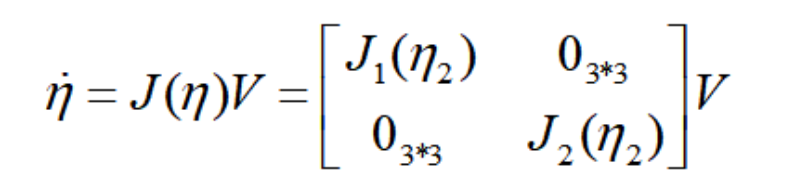
图1 过驱动AUV运动学模型
![]()
图2 过驱动AUV动力学模型
MPC可以有效处理过驱动AUV的多自由度控制问题,可充分考虑AUV的模型和约束条件。变论域S面控制器为经典S面控制算法与变论域模糊方法的结合体,新的算法结合了变论域模糊控制器的强鲁棒性和S面算法的易构造特性,进一步简化了控制器的设计。为了解决水下航行器的轨迹跟踪控制问题,将MPC与变论域S面算法结合,设计了一种新型的基于MPC和变论域S面算法的双闭环控制器。
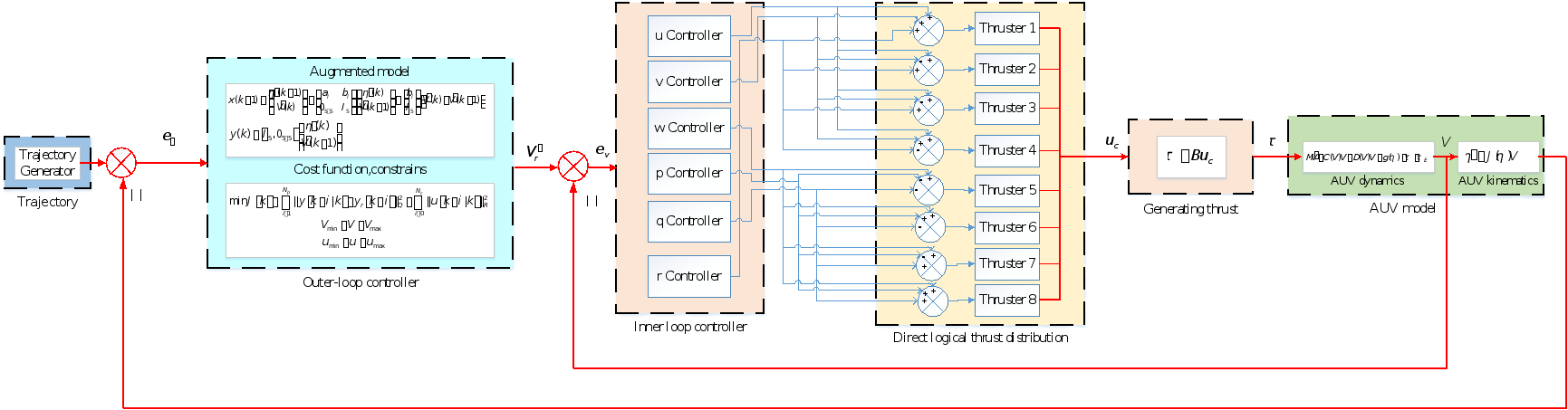
图3 过驱动AUV控制方框图
分别在无海流干扰和有海流干扰的条件下,仿真对比以MPC和PID结合的双闭环控制器方法对参考三维曲线轨迹的跟踪效果。
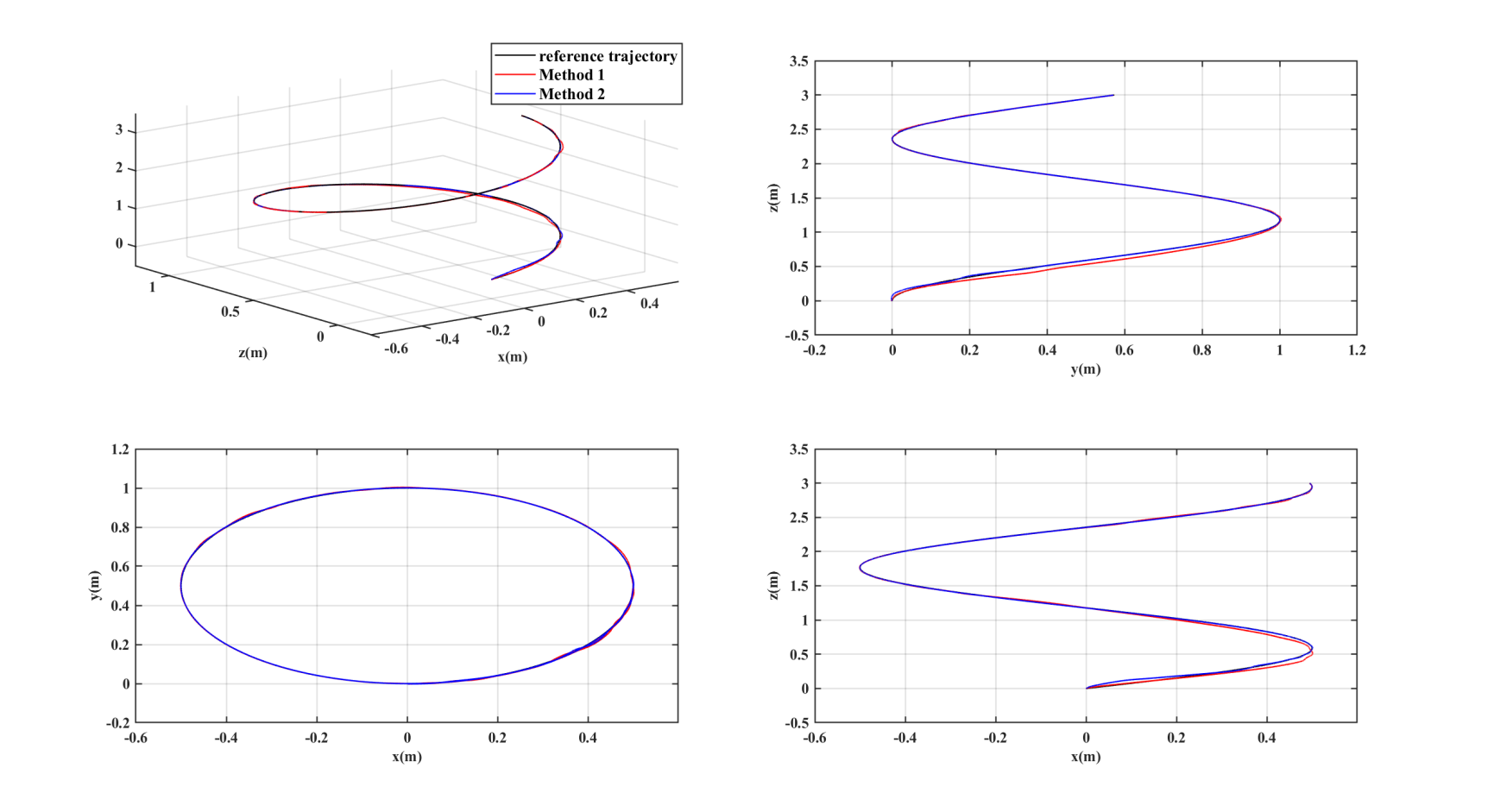
图4 有干扰下三维曲线轨迹跟踪效果
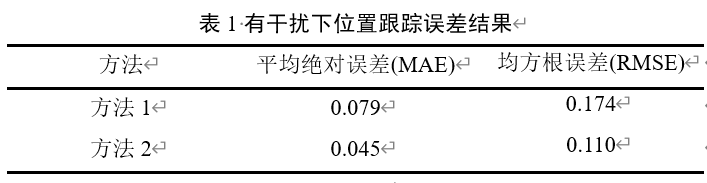
当AUV执行轨迹跟踪任务时,在加入持续的不确定性海流干扰后,本文所提出的新方法2相比于方法1的抗干扰能力更强,初始阶段偏离参考轨迹的幅度较小,且能在很短的时间快速地跟踪上参考轨迹,而方法1的实际运行轨迹具有明显的波动,抗干扰能力较差。
借鉴级联控制理论的思想,使用MPC和改进的变论域S面算法分别设计了运动学和动力学控制器,并使用Lyapunov函数分析了内环和外环的稳定性。在加入持续的不确定性海流干扰后,过驱动AUV仍能实现对三维曲线轨迹的快速精准跟踪,所设计的双闭环控制器抗干扰能力强,鲁棒性高,轨迹跟踪响应快。运动学控制器设计中考虑了实际模型的线速度和角速度的约束,可实时解算出当前时刻的最优控制律,控制增量输入的引入增强了系统的鲁棒性,减少了由于线性化运动学模型带来的误差和外界干扰对AUV模型参数的不确定性影响。建模过程中考虑过驱动AUV的推进器空间布置模型,采用接近最优能耗的直接逻辑法分配推力,建模过程更加精细,更加接近实际AUV模型。本文的动力学控制器的设计简单,相比于常规的PID控制器,参数调节过程快速方便。
许锋,中国石油大学(北京)信息科学与工程学院/人工智能学院副教授、硕士生导师。科研工作涉及控制理论及应用、生产过程的先进控制与优化、化工过程的流程模拟与分析、过程控制与工艺设计一体化研究等,长期从事炼油化工过程软测量与先进控制、流程模拟与实时优化等技术开发与工程应用工作。