
海洋立管反冲的鲁棒方差控制
中文题目:海洋立管反冲的鲁棒方差控制
录用期刊/会议:CPCC 2024(CAA-A类)
作者列表:
1) 孙世龙 中国石油大学(北京)人工智能学院 硕22级
2)谭文涛 中国石油大学(北京)人工智能学院 硕22级
3)岳元龙 中国石油大学(北京)人工智能学院 自动化系教师
摘要:
本文提出了一种鲁棒方差控制器,用于应对深水钻井隔水立管系统在紧急情况下,由于立管下部与防喷器组紧急解脱所产生的立管反冲现象。针对建模过程中由于参数误差和张紧器安装倾角变化引起的不可避免的模型不确定性,本文构建了增量式立管反冲状态空间模型,并通过极点配置和方差约束的控制方法实现了闭环系统的动态和稳态性能控制。仿真结果表明,该控制器能够有效抑制立管反冲现象,改善系统的动态和稳态响应,减少滑动接头和立管组件的损坏风险。
背景与动机:
深水钻井隔水立管系统连接着钻井平台与海底设备,在极端海况或设备故障等情况下,立管需要紧急脱离防喷器组。此时立管的弹性势能迅速释放,引发立管反冲,若不加以有效控制,可能导致严重的安全事故。立管反冲控制问题在国内外受到了广泛关注,但现有研究大多基于连续时间模型,且未充分考虑参数不确定性对立管反冲控制的影响。因此,为解决现有问题,本文提出了一种离散鲁棒控制方法,以提高系统的稳定性与鲁棒性。
设计与实现:
首先,在质量块-弹簧-阻尼模型种种考虑张紧器安装倾角变化和参数误差引起的模型不确定性,并建立了增量式立管反冲的状态空间模型。
![]()
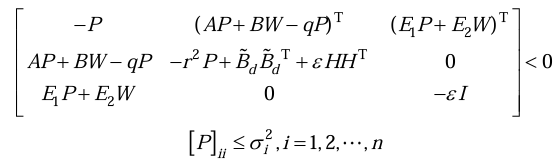
随后,使用极点配置技术将闭环系统的极点约束在复平面的指定区域D(q,r)内,以获得理想的动态响应。同时,基于方差约束理论,通过求解线性矩阵不等式(LMI)获得闭环系统的状态反馈增益,从而实现稳态方差的约束,确保系统的稳态性能符合要求。所设计的LMI如下所示
![]()
若想获得控制力最小的控制律,即最小化J(U),设计LMI求解获得最小能量鲁棒方差控制器
![]()
所设计的LMI如下所示
实验结果及分析:
为了验证所提出方法的有效性,本文基于中国南海某钻台平台的实际工程数据进行仿真分析。实验比较了鲁棒方差控制器(RVC)与离散LQR控制器及DRHGPC控制器在不同海况下的性能。结果显示,在正常和极端海况下,RVC能够更加快速地抑制立管反冲的位移,无明显超调现象,并且在稳态时的振幅更小。相比其他方法,RVC在动态和稳态性能方面展现了更优异的表现,同时能量消耗较少。此外,RVC在处理系统不确定性方面具有显著的鲁棒性,在不确定性达到10%或20%时,仍能维持较好的动态和稳态响应。
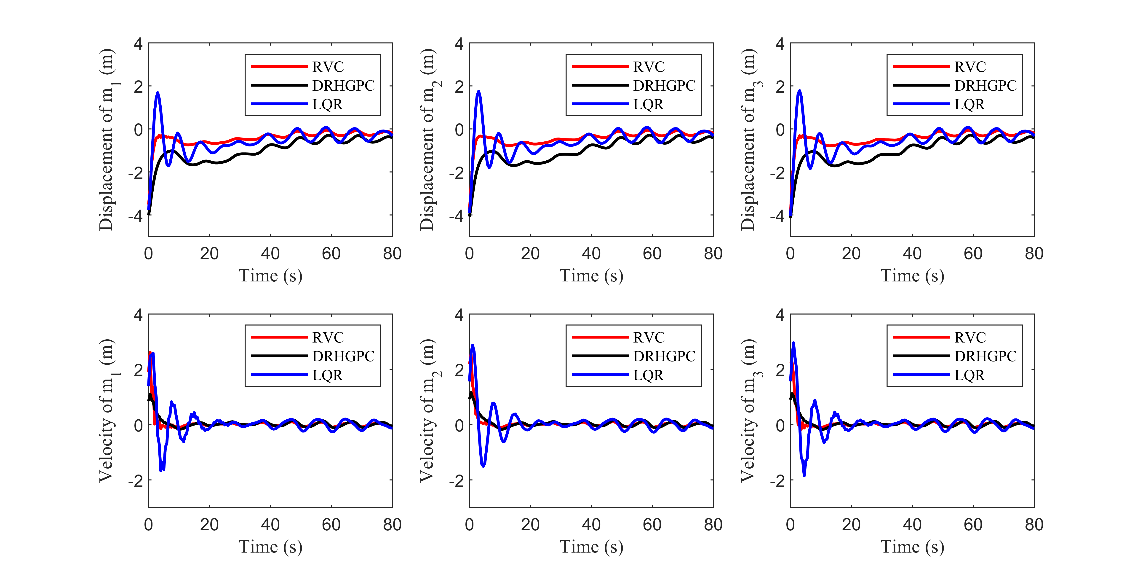
图1 RVC与DRHGPC、LQR控制下的立管反冲的位移与速度
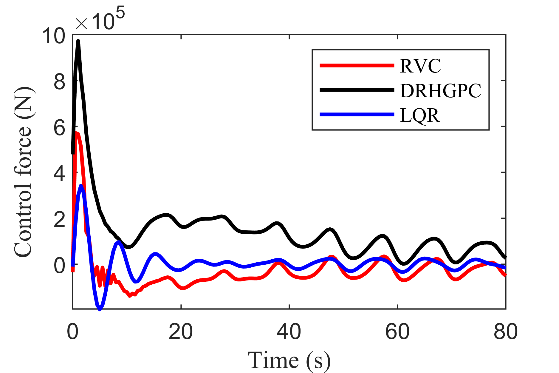
图2 RVC与DRHGPC、LQR控制下的立管反冲的控制力U
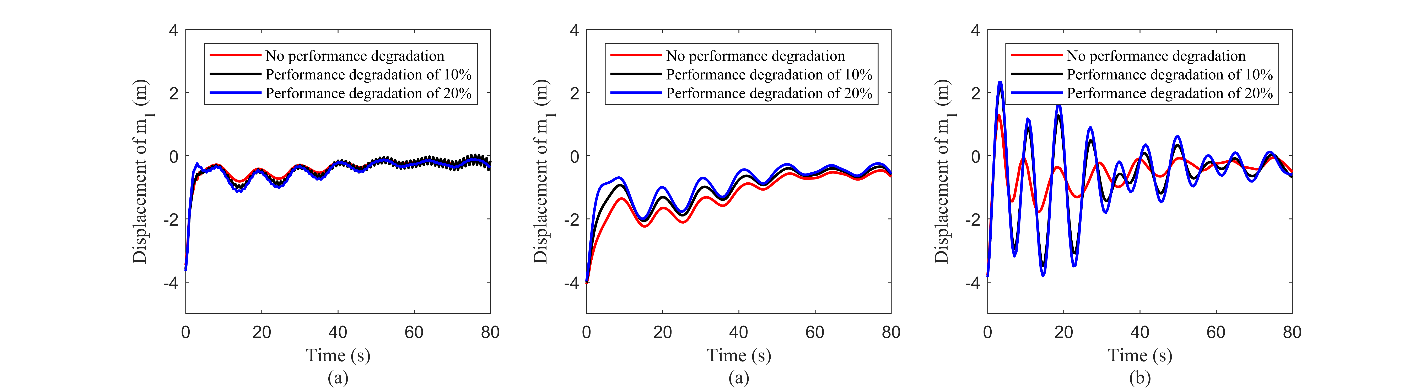
图3 不同程度参数不确定情况下质量块一RVC、DRHGPC与LQR控制效果对比
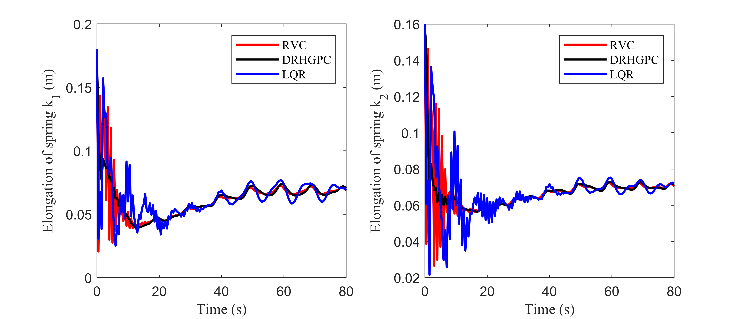
图4 等效弹簧形变对比
结论:
本文提出了一种针对深水钻井隔水立管反冲的鲁棒方差控制方法。通过考虑张紧器安装倾角和参数误差导致的模型不确定性,设计了增量式状态空间模型,并通过极点配置与方差约束控制闭环系统的动态和稳态性能。仿真结果表明,该方法能够显著改善立管反冲控制的动态与稳态性能,减少能量消耗,具有较强的鲁棒性。该方法不仅能够有效防止滑动接头和立管组件的损坏,还能在极端海况下保持良好的控制效果,为深水钻井隔水立管反冲控制提供了一种有效的解决方案。
通讯作者简介:
岳元龙,高级工程师。博士,中国石油大学(北京)人工智能学院自动化系高级工程师,从事深海油气水下控制系统关键技术研究、数据融合和嵌入式硬件开发。
联系方式:yueyuanlong232@126.com