
基于电流采样的并联有源电力滤波器改进控制方法研究
基于电流采样的并联有源电力滤波器改进控制方法研究
An improved control method based on source current sampled
for shunt active power filter
录用时间:2020.03.16
发表期刊:Energies,JCR Q1
原文DOI:https://doi.org/10.3390/en13061405
作者:曹旭东 信息科学与工程学院
董 堃 信息科学与工程学院 电子与通信工程 2017级
魏学良 信息科学与工程学院
有源电力滤波器(Active Power Filter, APF)是一种动态抑制谐波和无功的电力电子装置。为了简化传统APF的谐波和无功电流的检测和提取,本文使用了一种基于三相三线并联APF的直接电流源控制。对电源电流在d-q旋转坐标中利用比例-积分(PI)控制器对其做到无静差控制。此外,考虑到电网电压波动,提出了采用下垂调节器来解决直流母线电压对APF功率损耗和补偿性能的影响。该调节器与传统的电压外环PI控制相结合,可在APF系统的功率损耗和补偿性能之间实现全面优化。
论文内容:
1、数学模型建立
文章以三相三线并联APF为例,建立了APF电源电流控制的数学模型,并分析了其基本原理。图一为并联型APF系统结构。
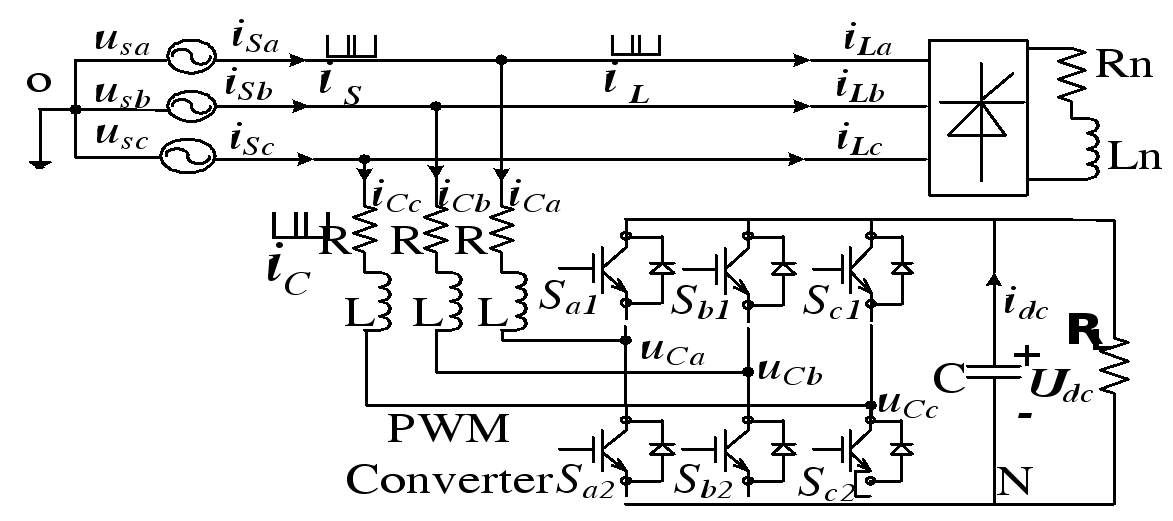
图 1并联型APF系统结构
设该三相三线并联APF是一个平衡系统。根据基尔霍夫电压电流定律,可以根据图一建立APF在三相静止abc坐标下下的数学模型如式1所示。
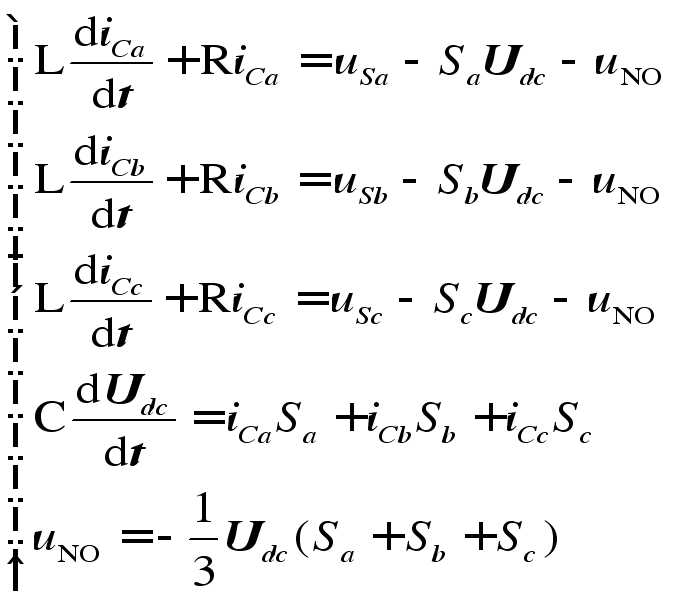 (1)
(1)
其中:iCa、iCb和iCc是APF输出电流,uSa, uSb, 和 uSc是三相电网电压,Sa, Sb, 和 Sc是六个开关管的占空比,且![]() (i为a、b、c)。
(i为a、b、c)。
根据图一,我们可以得到APF内电流关系如式2所示。
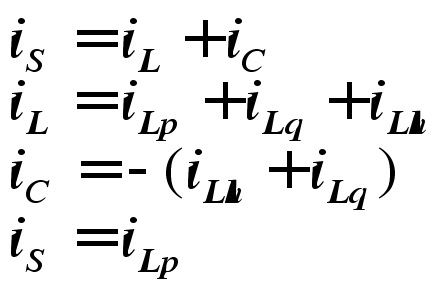 (2)
(2)
直接电源电流的基本原理是对APF系统中电源电流iS进行直接控制。将检测出的负载电流中的基波有功分量iLp作为指令电流,与实际电源电流iS进行比较,控制电源电流跟踪其指令电流的变化,达到谐波补偿的控制目的,最终使电网电流只含有基波有功分量。
为了实现无静差控制,需将APF通过abc-dq转换矩阵由三相abc静止坐标系变化为两相dq旋转坐标系下,其数学模型如式3所示。
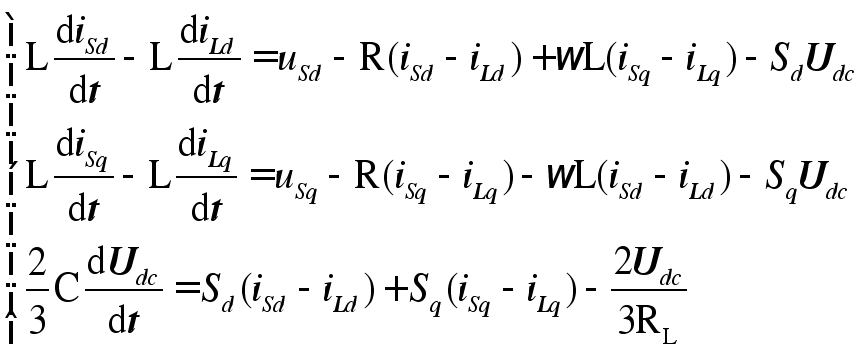 (3)
(3)
2、控制策略实现
APF直接电源电流控制主要由补偿电流控制环节和直流侧电压控制环节组成,根据式3的数学模型采用电压外环、电流内环的双闭环控制策略。电流环是通过解耦方式使d-q轴相互独立,并通过前馈通道抵消扰动量。图2是并联型APF电源电流控制的系统框图。
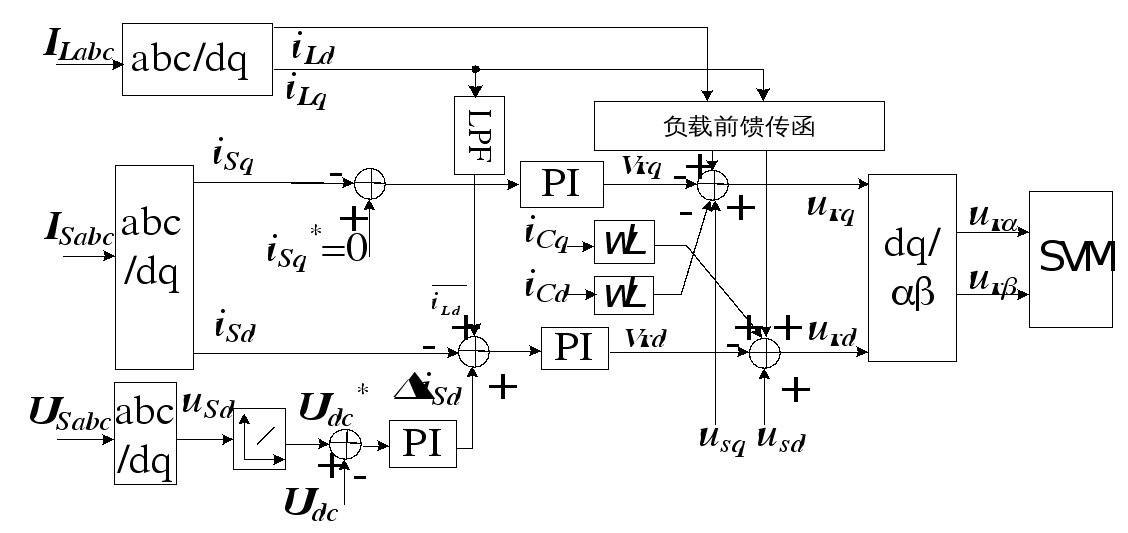
图 2 APF电源电流控制的系统框图
电网电压波动时,设计下垂调节器控制直流侧电压的指令值,实现APF的功率损耗和补偿性能的综合优化。
APF 直流侧电压指令值采用下垂调节器的控制策略如图 3所示,电网电压经过abc /dq变换后经过下垂控制器获得参考电压Udc* ,与实际采样值Udc 比较后经过PI 调节器输出一个有功电流调节信号ΔiSd,引入到电流内环来维持直流侧电压的稳定,实现APF的双闭环控制。
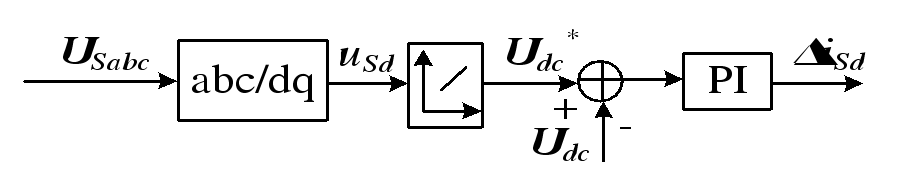
图 3 dq坐标系下APF电压外环采用下垂调节器的控制框图
3、仿真与实验验证
为了验证所提方案的正确性,在Simulink中搭建基于电源电流检测的模型,进行仿真分析,仿真结果如图4所示。
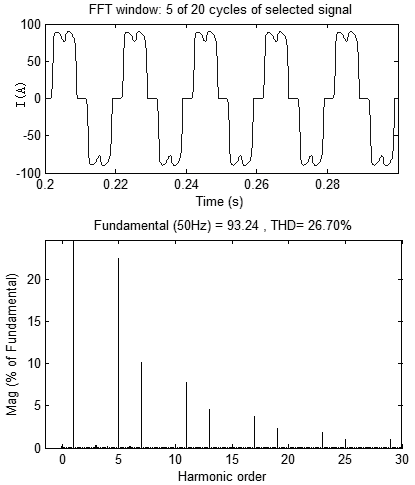
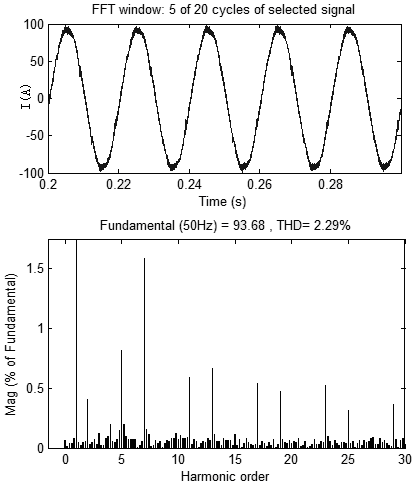
(a) (b)
经基于直接电源电流控制策略的APF补偿后的网侧电流基本为正弦波,且网侧电流THD由投入前的26.7%下降到2.29%。
(a)
(b)
(c)
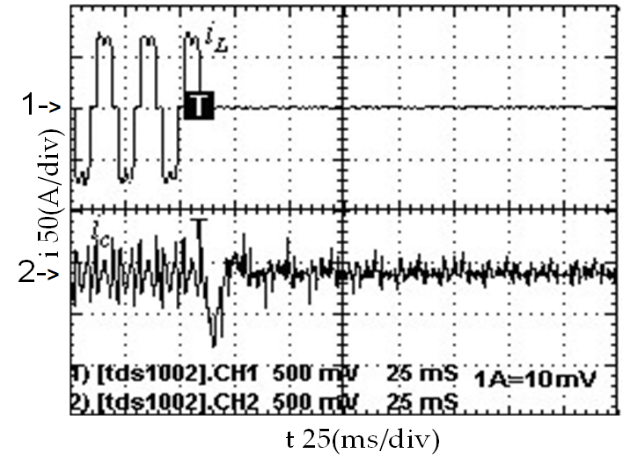
图 5 APF的动态响应性能
由图5可知,APF能够快速跟踪指令电流的变化,其动态响应在15ms以内,完全补偿达标大约在30ms左右。
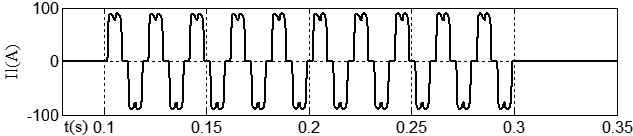
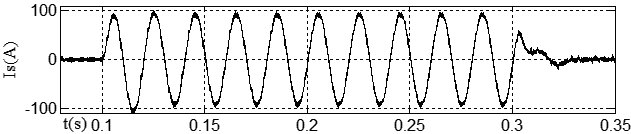
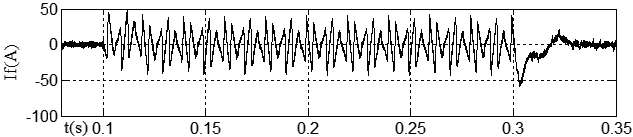
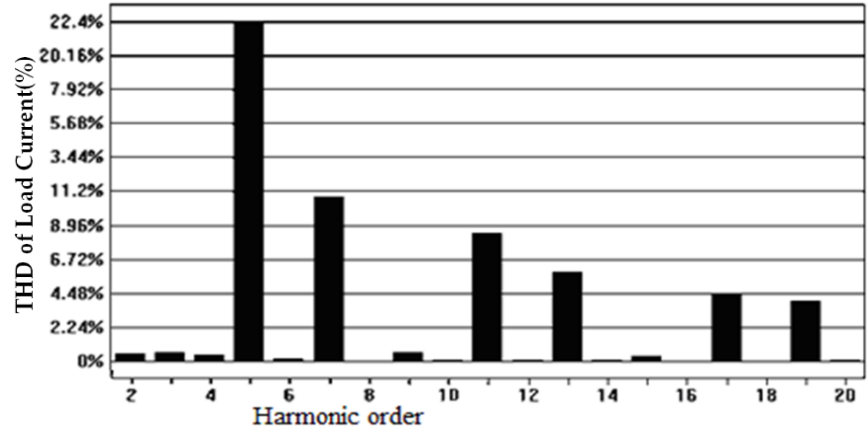
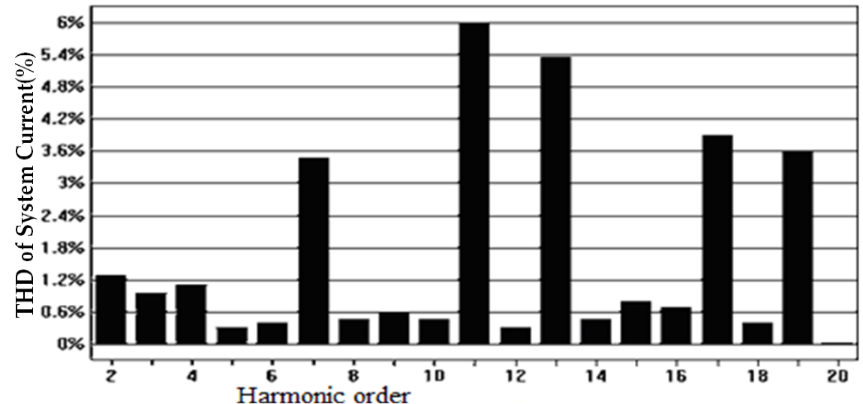
通过66KVA的APF验证理论的正确性。由图6可知,投入APF后,各次谐波均明显降低。
(a)
(b)
图 6 APF投入前后负载电流和系统电流波形频谱
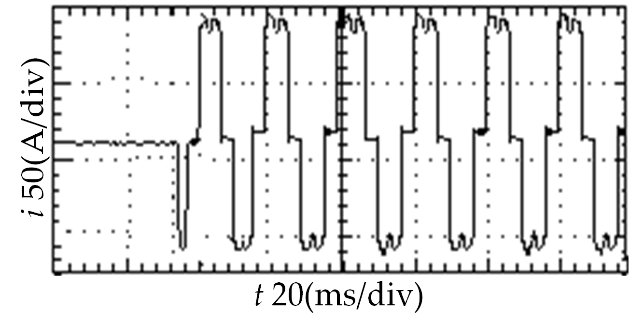
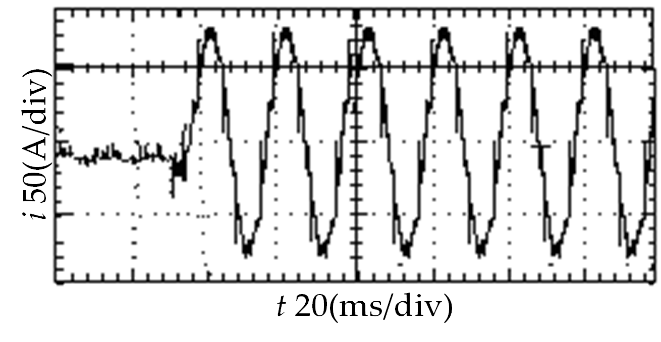
由图7可知,当APF负载突变时,控制器的响应速度较快。
(a)
(b)
图7 APF突加、突卸负载后电流波形
在电网电压波动的情况下,采用下垂控制器,当电网电压升高时,通过提高直流侧电压来提高APF的补偿能力:
表1 APF的补偿性能与功率损耗分析
Us% |
Udc/(V) |
Il/(A) |
THDI(%) |
Ploss/(KW) |
90% |
700 |
50.31 |
2.57 |
3.115 |
90% |
650 |
50.27 |
2.80 |
3.003 |
100% |
650 |
53.44 |
3.774 |
3.035 |
100% |
700 |
53.46 |
3.555 |
3.437 |
100% |
750 |
53.47 |
3.299 |
3.921 |
110% |
700 |
56.51 |
3.644 |
3.629 |
110% |
720 |
56.55 |
3.560 |
3.854 |
4、结论
本文分析了APF直接电源电流控制策略,通过构建电压电流双闭环串级控制器,将APF在dq旋转坐标系下通过PI调节器实现无静差控制,使其具有良好的补偿精度与动态性能。同时,设计下垂控制器来控制直流侧电压参考值并结合PI控制,最终实现APF的功率损耗和补偿性能综合优化。