
基于反馈线性化模型预测控制的气侵工况井底压力控制方法
论文题目:基于反馈线性化模型预测控制的气侵工况井底压力控制方法
录用期刊/会议:中国过程控制会议 (CAA A类会议)
录用/见刊时间:2024.7.25
作者列表:
1)徐宝昌 中国石油大学(北京)人工智能学院 自动化系 教师
2)姚 俊 中国石油大学(北京)人工智能学院 控制工程 研22
3)蔡 骁 中石油工程技术研究院
4)张景田 中石油工程技术研究院
5)董勃阳 中国石油大学(北京)人工智能学院 控制科学与工程 研22
6)孟卓然 中国石油大学(北京)人工智能学院 控制科学与工程 博20
摘要:
随着侵入气体向上运移和膨胀,环空静水压力和摩擦压力发生相应变化,导致井口回压与井底压力呈非线性关系,其中包括延时响应,反向关系。基于降阶气液两相流环空模型对气体运移阶段的系统,采用稳态分析法和反馈线性化方法对系统进行分析,分别得到反向线性关系产生区间条件和内动态渐进稳定条件,然后以井口回压为边界条件,以内动态渐进稳定条件为约束,设计了基于反馈线性化的模型预测控制(FL-MPC)控制器。并将其控制效果和以井口回压为边界条件的非线性模型预测控制(NMPC)进行比较。结果表明,FL-MPC方法延长了常规NMPC控制方法的稳定区间,而且在控制精度和鲁棒性上都有明显提升。
背景与动机:
通常,当气体侵入井筒后,随着侵入气体的向上运移及膨胀,极有可能使得整个环空系统处于不稳定状态,这对控制系统分析与设计提出了更加严格的要求。过去几十年中,已有大量学者研究了基于MPD的井筒气液两相流建模以及抑制气侵的控制方法。但是,这两方面研究仍存在以下不足:一方面,描述气液两相流动的模型通常由一组双曲型偏微分方程表征。该方程尽管足够准确,但其复杂度较高,数值求解较复杂,并不利于控制系统设计。另一方面,许多学者仅针对抑制气侵阶段建立不同的控制方法,如PID、模型预测控制、鲁棒控制等,未考虑气体运移阶段的控制效果,特别地,当气体运移接近至井口处,稳定井底压力更加困难。
设计与实现:
本文首先建立了一种降阶的气液两相流模型以反映气侵进行阶段和气体运移阶段各项参数的变化。其次,针对气体运移临近井口位置时井底压力的波动现象,利用反馈线性化方法,推导了此时系统的微分同胚与内动态方程。最后,利用外部分(线性模型)与内部分(内动态)结合的思想建立基于反馈线性化的模型预测控制方法,并通过仿真实验验证了该方法的可行性与先进性。
(1)简化气液两相流模型
为模拟侵入井筒内气体的运动,将整个井筒看作一个固定边界的控制体积(Control Volume, CV),且CV中仅包含一个气泡,气泡的描述采用“双形”气泡表示方法。

(2)反馈线性化
将环空两相流模型非线性状态空间方程写成仿射系统标准形式为:
系统满足能控性和对合性条件,对输入—状态线性化后的模型进行如下总结:
(3)系统内动态分析
利用微分几何方法,计算系统:

那么该系统的相对阶为2,小于系统阶次,给出系统正则化形式:

则输出定义为:

根据 可以给出:
可以给出:

这里,对 求导得:
求导得:
上述说明微分方程发散,内动态不稳定,而原系统则为非最小相位系统。此外,基于井口回压的非线性模型预测控制方法失效,均由系统的非最小相位特性决定。对于非最小相位系统,不应该寻找没有误差或使误差渐进收敛的控制律,而应该寻找误差尽量小的控制器。
(4)基于系统内动态分析的模型预测控制方法
提出一种将外部分(线性模型)与内部分(内动态)结合的双重控制方法。对于内部分,通过构造模型预测控制显式考虑内动态这一不稳定约束,而模型预测控制器输出的最优控制序列将作为线性模型。对于外部分,直接设计基于Lyapunov函数的控制律稳定线性系统。
实验结果及分析:
基于Fjelde等人提供的模拟数据,设立一个井深为4000米,内径为26.67mm,外径为12.4mm,钻井液为水的井筒模型,以井口回压为操纵变量,对简化两相流模型设计非线性模型预测控制器。具体参数如下表:
表2 井身结构参数

以井口回压为操纵变量,对简化两相流模型设计非线性模型预测控制器。整个仿真过程为2500步,0-90步为气侵阶段,90-100步为抑制气侵阶段,100-2500步为气体运移阶段。井底压力初值为490bar,地层压力为500bar,控制算法将井底压力驱动至508bar并尽可能保持井底压力恒定。
由表3和图2可以看出,FL-MPC方法的 比NMPC(MV:井口回压)方法的
比NMPC(MV:井口回压)方法的 更低。注意,由于系统本身的特性,不同控制方法只能尽可能减小
更低。注意,由于系统本身的特性,不同控制方法只能尽可能减小,不可能使其满足
 。换句话说,随着时间的推移,由于系统内动态不稳定,系统本身为非最小相位系统,系终会发散,合适的控制策略只能保证在当前井身结构(尤其关注井筒深度)的气体运移过程中,井底压力尽可能地保持在可控范围内。图2为FL-MPC和NMPC方法对井底压力的控制效果。FL-MPC在接近井口处才出现发散迹象,而且其快速性和抑制超调能力远高于基于井口回压的NMPC方法。
。换句话说,随着时间的推移,由于系统内动态不稳定,系统本身为非最小相位系统,系终会发散,合适的控制策略只能保证在当前井身结构(尤其关注井筒深度)的气体运移过程中,井底压力尽可能地保持在可控范围内。图2为FL-MPC和NMPC方法对井底压力的控制效果。FL-MPC在接近井口处才出现发散迹象,而且其快速性和抑制超调能力远高于基于井口回压的NMPC方法。
表3 不同阶段的实验参数说明
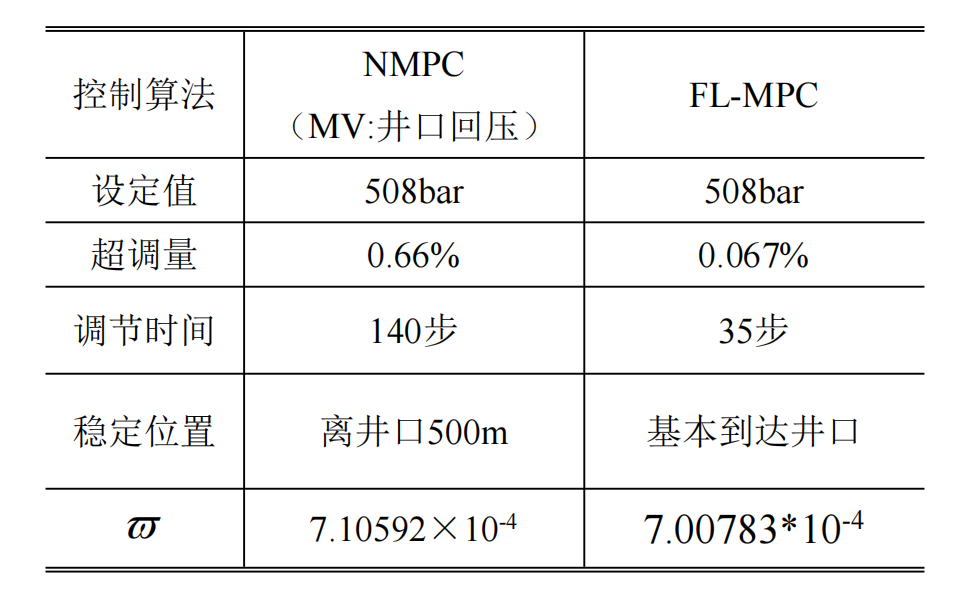
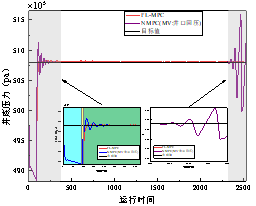
图2 FL-MPC与NMPC作用下井底压力变化
小结:
(1)气体运移前期阶段,因为气泡位置靠近井底,井底压力使气泡难以膨胀,此时气泡体积较小,井口回压和井底压力变化呈线性关系。随着气泡不断上移,气泡所处位置压力变小,气体膨胀速度加快,在临近井口处达到顶峰。此时,井口回压变化和井底压力变化呈非线性关系。
(2)通过内动态方法确定气体运移阶段的两相流环空系统为非最小相位系统。对于非最小相位系统,不应该寻找没有误差或使误差渐进收敛的控制律,而应该寻找误差尽量小的控制器。
(3)基于内动态设计的FL-MPC控制器在气体运移阶段能够延长传统的以井口回压为操纵变量的NMPC控制器的稳定区间,而且因为反馈线性化的本身方法的优越性,减小了超调量,提升了调节速度。在控制精度,稳定性上都有了明显的改善。
作者简介:
徐宝昌,教授,博士生导师/硕士生导师。长期从事复杂系统的建模与先进控制;钻井过程自动控制技术;井下信号的测量与处理;多传感器信息融合与软测量技术等方面的研究工作。现为中国石油学会会员,中国化工学会信息技术应用专业委员会委员。曾参与多项国家级、省部级科研课题的科研工作,并在国内外核心刊物发表了论文70余篇;其中被SCI、EI、ISTP收录30余篇。