


机械与储运工程学院ISFR机器人团队在《Soft Robotics》杂志发表论文:带有大鱼际的灵活多关节软体仿生手
软体机械手由于自身材料的柔软特性,在顺应性、抗冲击性方面有着得天独厚的优势,不但可以实现抓取不同重量、大小、形状的物体,并且自身受到外界挤压、扭转时,几乎不会损坏。近年来,相较于刚性机械手,结构简单、制作便捷的软体机械手吸引了越来越多研究人员的注意。根据手指原理结构的不同,仿生手指经历了从单腔执行器向多腔执行器发展的过程。单腔执行器工作状态下呈现出较为标准的圆弧状,依靠自身材料的顺应性被动地适应被抓取物体的形状和尺寸,但仍不能像人手一样依靠多个关节之间的配合做出复杂的手势或主动地适应物体的外形、尺寸和表面,仿人手多关节结构的多腔执行器成为了设计灵活手的更佳选择。
近日,机械与储运工程学院机器人工程专业刘书海、肖华平两位老师组建的ISFR机器人团队,提出了一种多关节的气动软体灵活机械手。仿生手指和仿生拇指(包括大鱼际执行器)通过多步浇注的工艺制备,由气压驱动,具有良好的弯曲性能和输出力。人的手掌正面拇指根部,下至掌跟,伸开手掌时明显突起的部位,医学上称其为大鱼际,由于大鱼际的存在,使得大拇指拥有显著的灵活性。机械手的每个手指关节可以独立弯曲,配合灵活的大鱼际气动肌肉,能够模仿多种人手动作甚至是用手语表达字母,还能够实现对于不同大小、重量、形状和表面纹理的目标物的稳定抓取。该项研究成果以博士研究生郝天泽为第一作者在国际机器人领域著名期刊《Soft Robotics》和《Smart Materials and Structures》上以“Multijointed pneumatic soft hand with flexible thenar”和“Flexible and stable grasping by multi-jointed pneumatic actuator mimicking the human finger-impacts of structural parameters on performance” 为题发表。
链接:https://www.liebertpub.com/doi/10.1089/soro.2021.0017
https://iopscience.iop.org/article/10.1088/1361-665X/ac3405
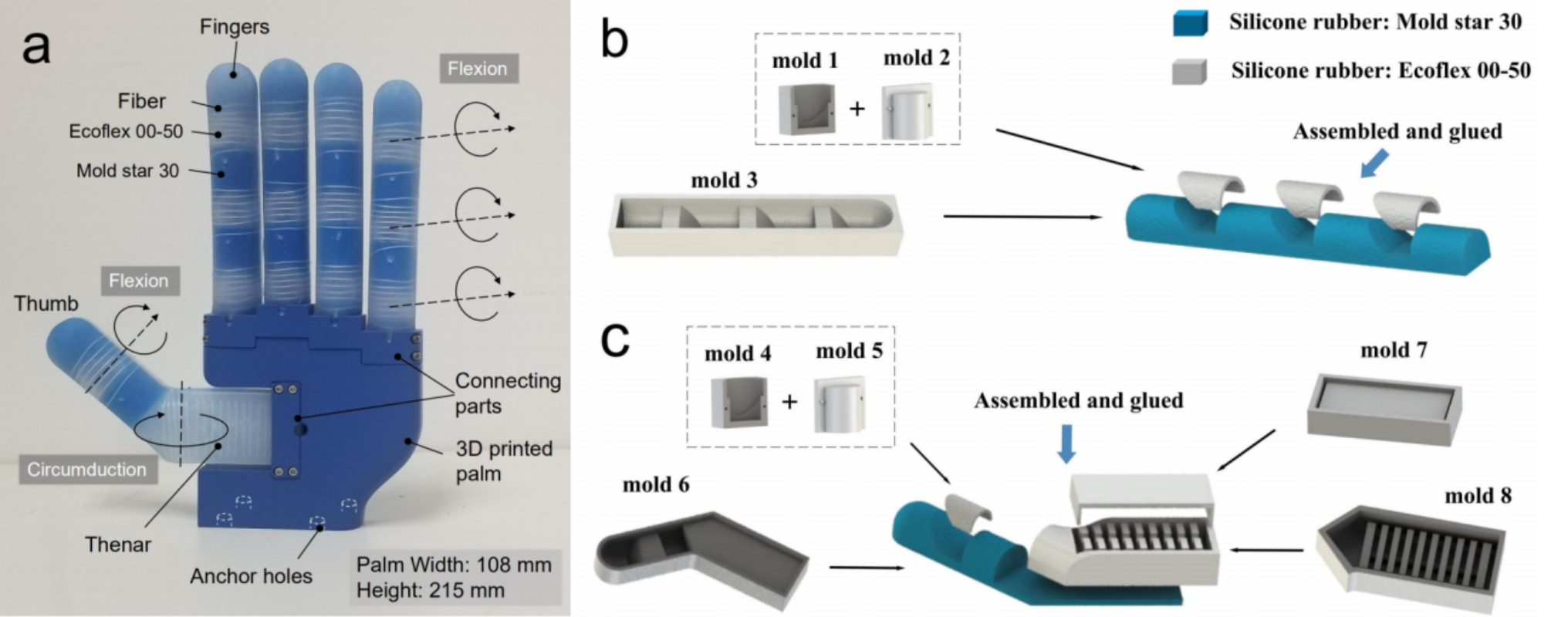
多关节仿生手的实物图及设计、制造流程。(a) 多关节仿生手的部件示意图;(b) 仿生手指和(c) 仿生拇指的制作流程。
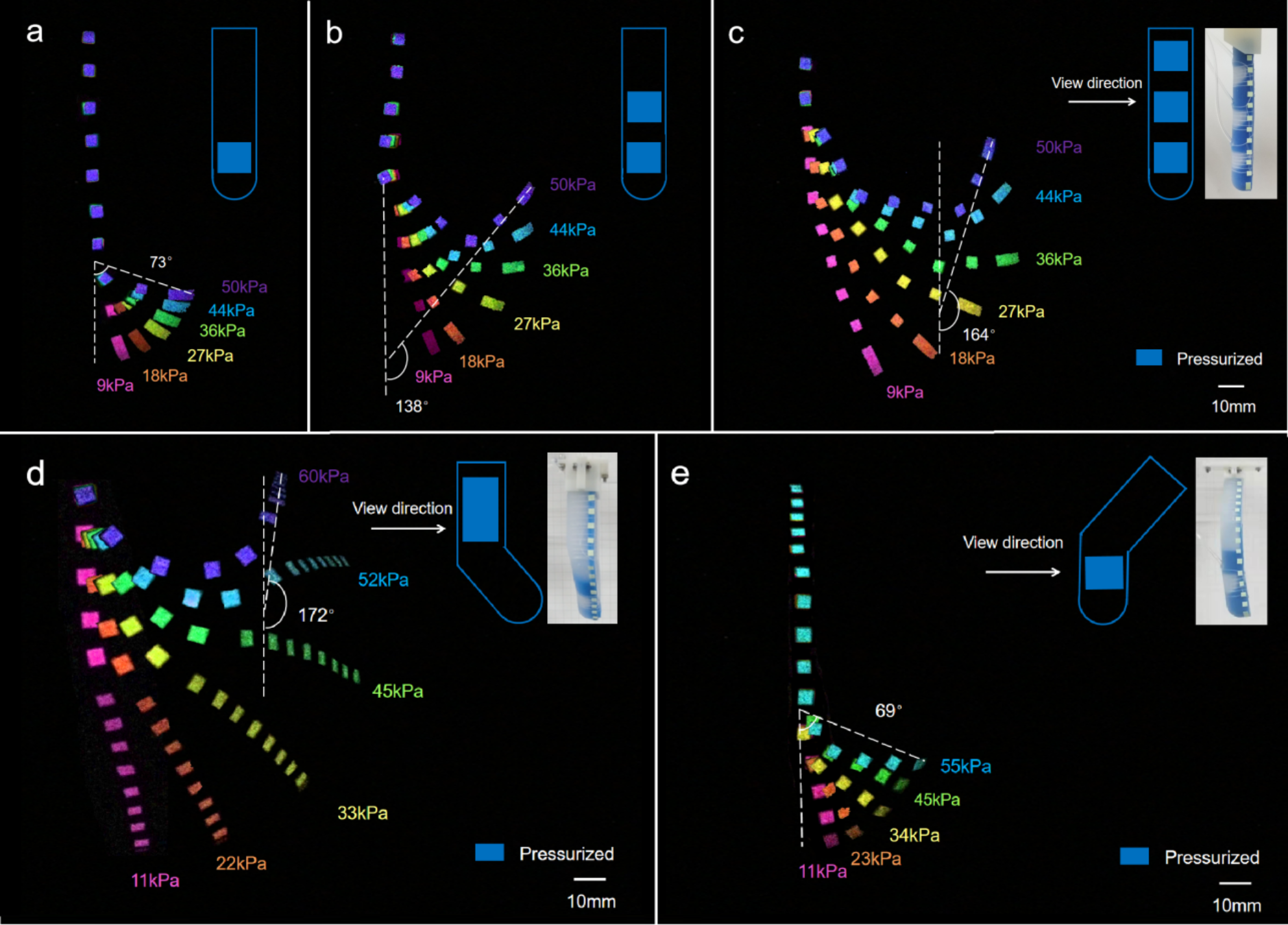
手指和拇指(包括大鱼际)在不同气压下的弯曲轨迹。(a-c)仿生手指不同关节的弯曲轨迹;(d)拇指的弯曲轨迹;(e)大鱼际的弯曲轨迹。

推力测试实验。(a)推力试验台;(b) 不同气压下仿生执行器的推力.

用手语手势表达26个英文字母。
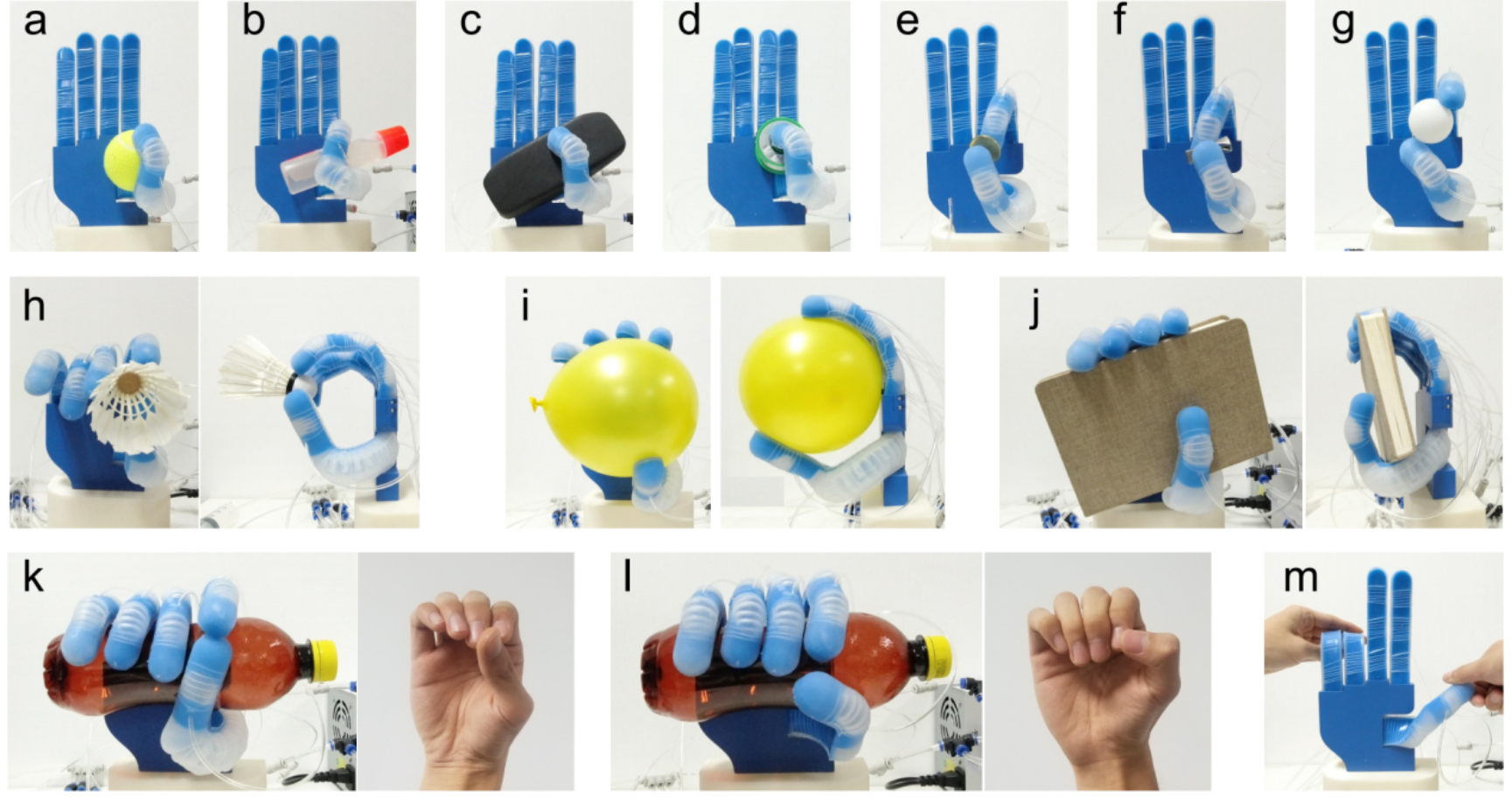
用三种抓取方式抓取不同目标物。(a-d) 拇指抓取方式;(e-g)精准抓取方式;(h-l) 有力抓取方式;(m) 稳定性测试。

YCB(Yale-CMU-Berkeley)抓取测试。
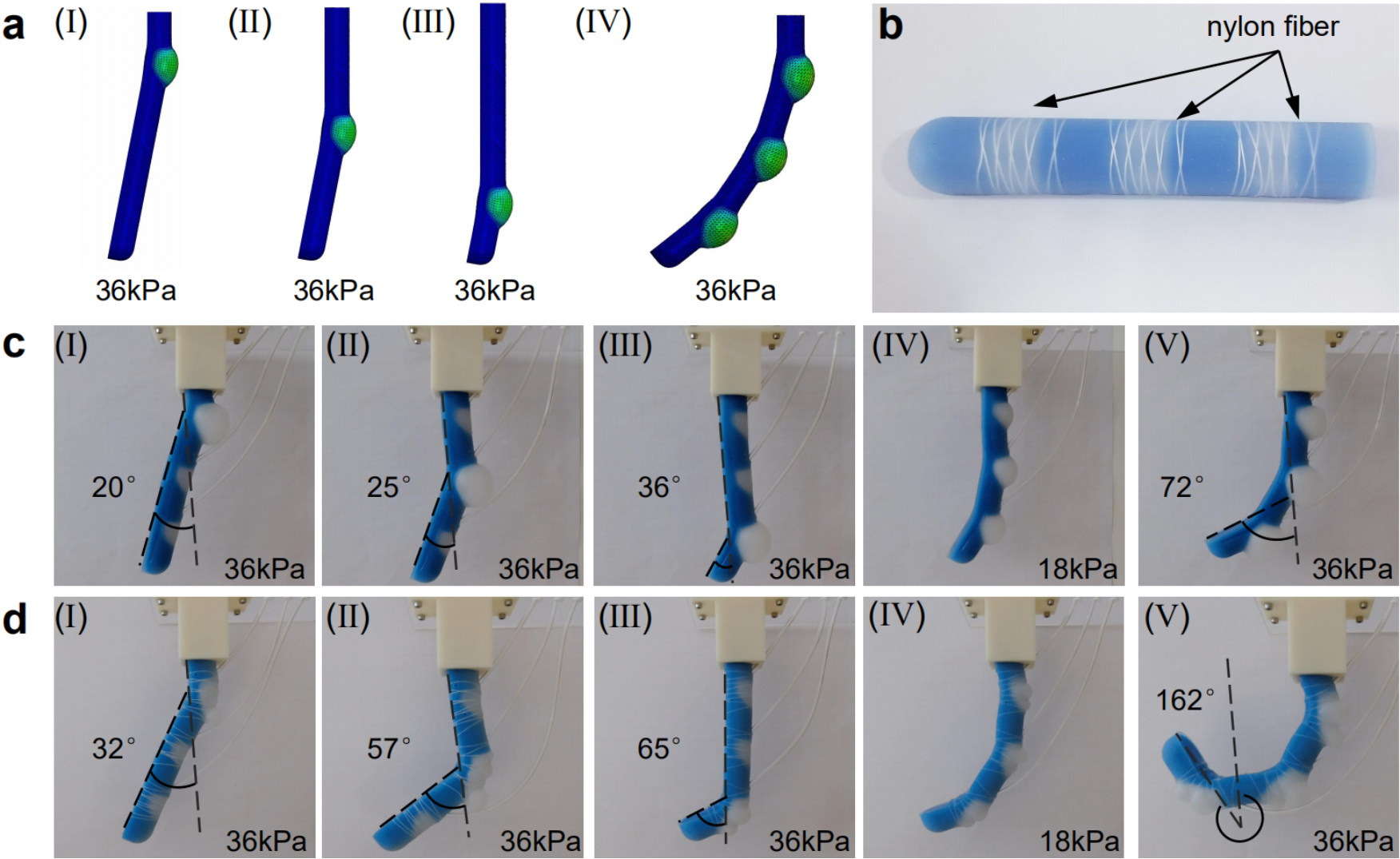
执行器的仿真和实验对比。(a)36kPa下三腔执行器的仿真预测结果;(b)纤维增强的三腔执行器;(c)无纤维增强的三腔执行器的弯曲结果;(d)纤维增强的三腔执行器的弯曲结果.